台州伟创伺服/运动控制-单轴伺服控制带宽分析
2023-03-09
运动控制-单轴伺服控制带宽分析
前记
十分不好意思,近期因为个人工作繁忙等,单个工业机器人工作站方案的仿真过程 _ 毕业后三年内工作的工作总结(一)的后续两篇文章将会延迟。今天与大家分享下单轴伺服控制带宽的学习总结。
伺服台州伟创伺服电机、伺服驱动器核心代理商控制是运动控制的基础,正如SIEMENS在介绍其运动控制平台SIMOTION的时候解释为:SINAMICS = Muscle SIMOTION = Brains,顺便安利下自己以前的一个回答知乎用户:工业控制与自动化领域中,运动控制怎么理解?因为个人工作与运动控制相关,为了更好地从事本职工作,学习了单轴伺服控制带宽方面的东东,下面把学习后的总结分享给大家。因自己在伺服控制方面是小白,所以恳请知乎大神们轻拍,如有错误,谢谢大家指正。
正文
伺服单轴一般由带反馈装置(编码器或者旋转变压器)的永磁同步伺服交流电机PMSM、减速器(RV摆线针轮减速器、谐波减速器、滚珠丝杆或者齿轮箱)和连杆等组成。而运动控制中典型的例子:工业机器人的整体的响应和跟踪误差很大程度上取决于每个单轴的机电伺服性能,因此本文从PMSM电机本身、PMSM电机的磁场定向控制FOC、电流环、编码器、单轴位置环和速度环伺服算法、机电惯量匹配、机电柔顺谐振等方面整理。
1 永磁同步伺服交流电机PMSM原理及数学模型

图 1永磁同步伺服交流电机PMSM组成结构
永磁同步伺服交流电机的组成如图1所示,其中转子为永磁体(一般由内置式永磁体转子和表贴式永磁体转子两种,欧洲品牌高端伺服电机通常采用的是内置式永磁转子结构, 日本、台湾及本土品牌中以表贴式永磁转子结构为主),定子为线圈绕组组成。其工作原理如下图所示。

图 2永磁同步伺服交流电机PMSM工作原理示意图
图中的Fs为三相永磁同步电机的定子磁场(当电机定子绕组中通过三相交变电流时会在定子绕组中生成旋转磁场),Fr为转子磁场(转子本身为永磁铁组装而成的永磁场)。旋转磁场Fs将会带动Fr转子磁场旋转。FOC 磁场定向控制主要是依靠坐标变换,即Clarke和Park变换以及其逆变换(参见图3所示),将三相交流电的控制转换为两相直流电的控制方式,其中Clarke变换将三相参考坐标系转换为两相正交参考坐标系,Park变换将两相正交参考坐标系转换为两相旋转参考坐标系。

图3 Clarke和Park变换
其中d轴(the direct axis)的选取与转子磁通方向平行,这样在d(the direct axis)-q(quadrature-axis)坐标中建立PMSM的数学模型:
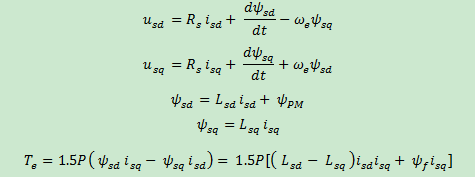
因为一般情况下,永磁对称的贴装在转子表面或者嵌入到转子表层,因此定子d轴和q轴的电感认为近似相等。所以

则电机的力矩常数为

从上式可以看出,定子电流分解的d轴对电磁转矩并没有作用,为了保证最大力矩的输出,驱动器控制芯片中一般进行id =0 控制。
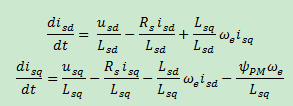
对上述微分方程进行拉普拉斯变换:

将其转化为状态方程为:

将其中的耦合项认为是扰动,即:

图4 PMSM电气模型方框图
所以有:

传递函数为:
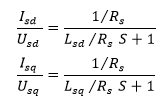
如果Isd等于0,则正交轴电压方程为:


由上述推导可知,PMSM电机通过Clarke和Park变换后,其电气模型为典型的一阶惯性环节,针对PMSM的电气模型的控制,即电流环的控制一般采用PI控制或者其变形方式进行控制,下图为一典型的针对d轴和q轴的控制方框图:

图5 PMSM电气模型及其控制的方框图示例
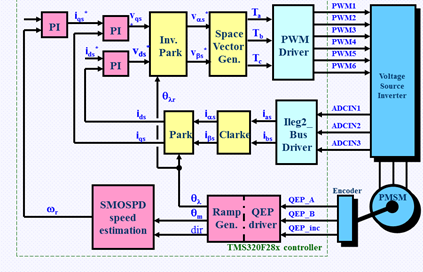
图6 基于TI公司C2000系列DSP的PMSM控制原理图
由上图可知,PMSM控制芯片中不仅需要完成电流环的控制,还需完成PWM的控制。PMSM电机PWM通常采用空间矢量脉宽调制SVPWM。
SVPWM是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链。SVPWM的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM波形。其中逆变器(Inverter)又称为放大器(Amplifier),其逆变电路如图8所示。
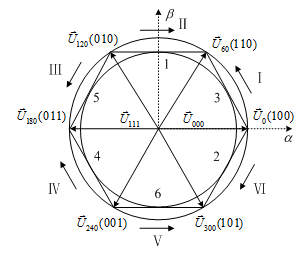
图7 SVPWM控制原理图

图8 逆变电路
PMSM电机的机电模型:

图9 PMSM电机的机电模型
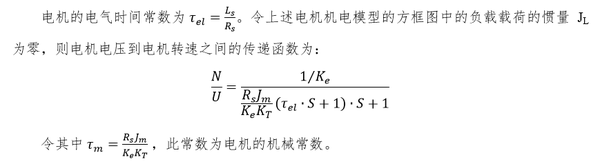
则可以转化为:
电机电压到电机电流之间的传递函数为:

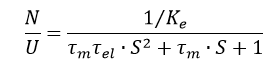
当电机开关接通的瞬间,相当于阶跃响应,所以有:
由上式可知电机启动瞬间,电机转速的时间响应曲线为二阶系统的单位阶跃响应曲线,而电流的时间响应曲线为二阶系统的单位脉冲响应曲线。
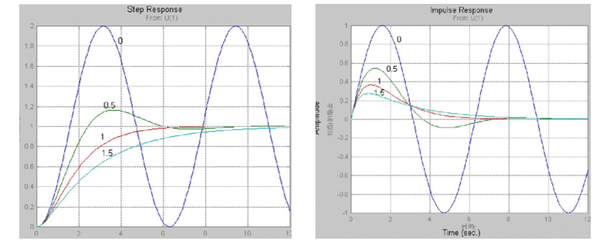
图10 a.电机启动瞬间电机转速的时间响应曲线 b.电机启动瞬间电机电流的时间响应曲线
电气常数和机械常数是电机自身的特性常数。电气常数和机械常数对固有频率的作用是相同的,而对阻尼的变化正好是相反的。当阻尼系数一定时,为了能够提高电机自身的响应特性,一般设计电机时,需要小的电气常数和机械常数。

并非指在电机的不同环境下仍然保持常数,准确地说电机常数和机械常数是电机内部环境温度的函数。随着环境温度的提高,定子电阻Rs数值将会增大,这将导致电气常数减小和机械常数增大;温度的提高,将会导致永磁体磁性的减弱,所以会直接导致反电动势常数Ke和力矩常数KT 的减小,进而影响机械常数的增大。所以高性能的伺服台州伟创伺服电机、伺服驱动器核心代理商电机中存在温度常数,其对应的驱动器能够根据电机自身的温升曲线,动态的修改电机的电气常数、反电动势常数、力矩常数和机械常数。下图为西门子紧凑型伺服电机1FK7032-2AK71的电机参数表。

图11 西门子紧凑型伺服电机1FK7032-2AK71的电机参数表
2电流环控制分析
现在的PMSM电机的驱动器中控制大都采用数字控制方式实现,其控制平台采用几种方式:(1)DSP为核心的MCU模块,现场总线的ASIC模块(2)DSP为核心的MCU模块,以太网的FPGA模块(3)集成分立式的ARM和DSP的FPGA模块。
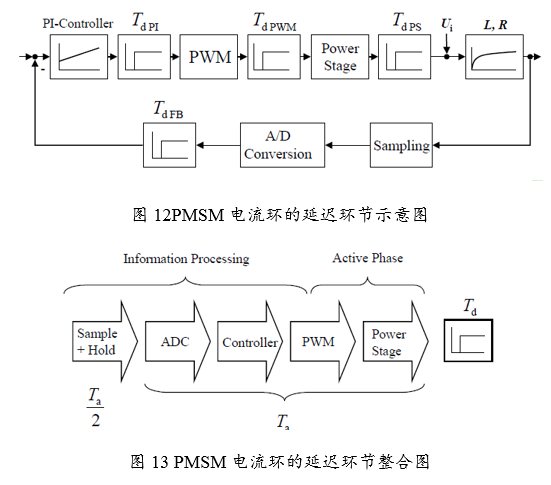
上节PMSM电流环控制并未考虑延迟因素,但是现在的伺服控制普遍采用了全数字控制方式,数字控制方式将会在不同的模块中引入延迟:PMSM电机的数字控制将会引入反馈环节的采样保持延迟、PI控制算法(PI类似算法)的计算延迟、SVPWM算法的计算延迟和逆变电路的开关延迟,具体见图12和图13所示。延迟将会引入相位滞后和死区时间
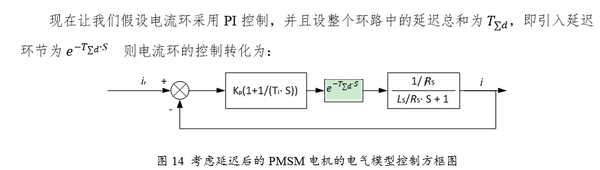
考虑延迟的考虑延迟后的PMSM电机的电气模型控制的开环传递函数为:

若不考虑延迟的考虑延迟后的PMSM电机的电气模型控制的开环传递函数为:

不考虑延迟的考虑延迟后的PMSM电机的电气模型控制的闭环环传递函数为:

这就意味着延迟环节对系统的输出幅值不产生影响,而会对系统输出相位产生滞后作用。延迟环节存在将会直接导致系统的带宽降低,延迟越大,对系统的带宽降低越明显,因此为了提高电流环的系统响应,需要减小延迟,针对上述延迟环节,可供的方法有:
1) 降低PWM时间常数即通过提高开关频率,高的PWM频率产生较小的电流纹波并实现高电流环路带宽,但同时也增加了开关损耗, 散热会导致额定电流降额,因此一般不采用此步骤。现在的开关频率通常为16Khz~32Khz;
2) 降低电机的电气时间常数(与电机的自身特性相关),减小相位滞后;
3) 降低整个模型计算的时间常数:可以通过采用史密斯预估器(见图15),但是此方法要求精确的电机模型;或采用更好的硬件平台(如FPGA),减小计算时间;
4) 采样策略变换和采样频率的提高(更换ADC硬件),具体见图16所示;
为了缩短ADC的时间,现在很多情况下采用sigma-delta ADC模块并配合一个数字滤波器来实现。sigma-delta ADC的基本思想是先对信号进行过采样,接着用负反馈网络对量化噪声进行低频衰减,高频放大,把大部分噪声功率整形到信号频带之外,最后用数字滤波器滤除带外噪声,达到提高精度的目的。

图15 史密斯预估器对电流环带宽的影响

图16 不同采样策略的电气相关时序图
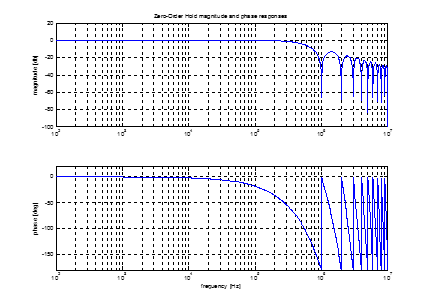
数字系统典型的环节为数字采样保持环节,且保持环节多使用零阶保持器,即:

采样保持器为单位脉冲系列,零阶保持器的传递函数为:

由图17可知,当提高采样频率后,相位滞后将会减小。当开环系统的环路增益和相位达到0分贝 和-180°,系统将失稳。高性能的运控应用需要尽可能高的增益。为了需要更高的增益,且保持相位的裕度的稳定,我们需要降低相位滞后。相位裕度Phase margin,其合适的变化范围应该在50°至80°范围内。
电流环为级联伺服控制的内环,其带宽应尽可能的高,这样才能保证其他环路的带宽。高性能电流环对于外部来说,可以使用一个二阶微分环节代替,带宽为电流环自身的带宽,阻尼系数取0.7即可。电流环的典型的更新频率为16Kz,高性能的电机的带宽为2000Hz-5000Hz。
网上有大神做过类似 实验,顺带安利我的另外一个答题:知乎用户:工程上如何理解带宽频率?实际意义是什么?为什么大学学习过程中很少强调带宽的概念?
3 编码器
高分辨率的反馈允许更高的控制增益,更高的控制增益意味着更高的控制带宽,即更快的时间响应。低分辨率的位置反馈易引入位置反馈噪声,进而引入速度反馈的噪声。低分辨率的量化的反馈信号通过伺服控制器传递进而产生电流尖峰。 这些尖峰又产生了噪音,热量和扭矩扰动。电流环的噪声是很多伺服控制中的主要噪声来源。
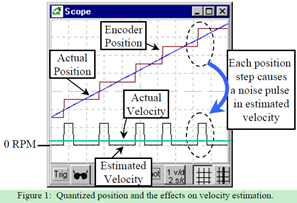
图18 量化位置信号及其对速度评估的影响
高的伺服增益应用时,伺服性能指标和扰动响应指标将得到改善。但是,高伺服增益放大了由反馈分辨率限制引起的噪声。在恒速应用中,伺服增益的主要功能是限制干扰转矩的影响。干扰扭矩来自任何数量的来源,包括负载摩擦,负载惯性力和滚子偏心率不足。高伺服增益降低了这些干扰的影响,但同时加剧了编码器引起的量化噪声。使用高分辨率反馈装置通常允许提高伺服增益以补偿干扰。
针对环路中的噪声,一种简单的处理方式使用滤波器,放置滤波器的地方有反馈滤波器、前向滤波器和电流环的隐式滤波器。增加滤波器将会导致过冲和失稳。如果添加滤波器后,仍然不能够解决问题,需要提高编码器的分辨率。可以通过提高线数提高分辨率,编码器一般随着分辨率的提高允许的最高速度将会降低;有些编码器,可以通过提高编码器的时钟频率。旋转变压器可以通过提高其插补ILSB来提高分辨率。正余弦编码器可以通过插补其模拟量信号来提高分辨率。
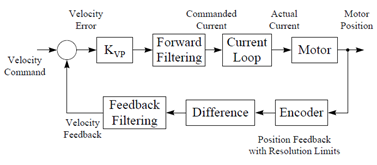
图19 速度环中滤波器布置图
旋转变压器随着频率的增加,其相位滞后将会增加。但是光电编码器几乎没有相位滞后,因此在一些高性能的应用场合,经常使用编码器。但也不是绝对的,在KUKA的机器人常采用旋转变压器,旋转变压器的旋转变压器的信号处理模块CPU采用了FPGA。
江苏和讯自动化设备有限公司成立于2012年,注册资本1000万元。公司是集研发、项目设计、销售、维修、工控自动化培训为一体的专业自动化公司。是veichi伟创总代理、kinco步科核心代理,主营销售:伟创变频器、伟创伺服、伟创PLC、伟创行业专机、步科触摸屏、步科步进电机、步科伺服、步科低压伺服、步科PLC、步科变频器等产品,凭借优惠的价格和专业的售后服务获得合作伙伴的广泛好评,欢迎来电咨询。
感谢您访问台州伟创总代理、步科核心代理网站,我们会为您提供优质的服务。
台州步科触摸屏_台州步科手持屏_台州步科PLC_台州步科触摸屏一体机_台州步科伺服__台州步科伺服一体机_台州步科步进电机_台州步科变频器